Publications
10 papers; *: equal contributions
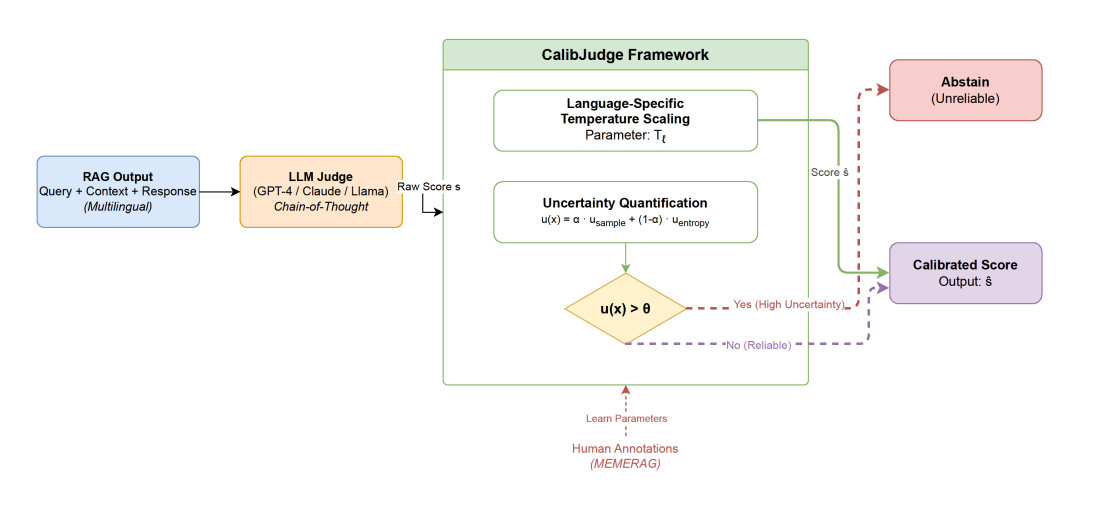
CalibJudge: Calibrated LLM-as-a-Judge for Multilingual RAG with Uncertainty-Aware Scoring
A calibrated LLM-as-a-Judge framework for multilingual RAG evaluation with uncertainty-aware scoring.
Kubrick: Multimodal Agent Collaborations for Synthetic Video Generation
Automatic synthetic video generation via multimodal agent collaboration with Vision LLMs and 3D engine scripting.
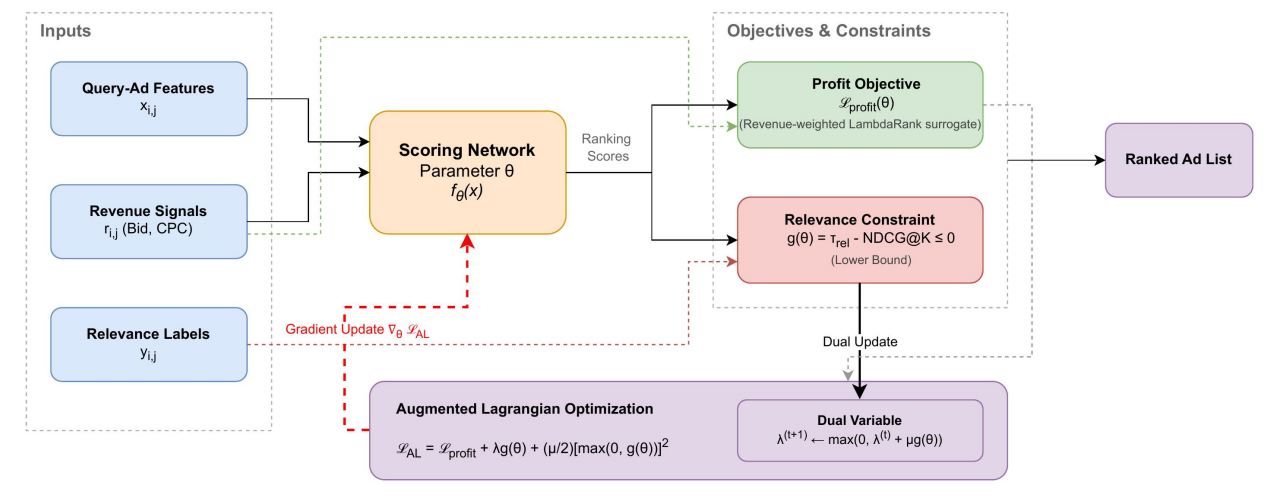
Constrained Learning-to-Rank for Controlled Trade-offs in Multi-Objective Ranking Systems
A constrained learning-to-rank formulation for balancing competing objectives in multi-objective ranking and recommendation systems.
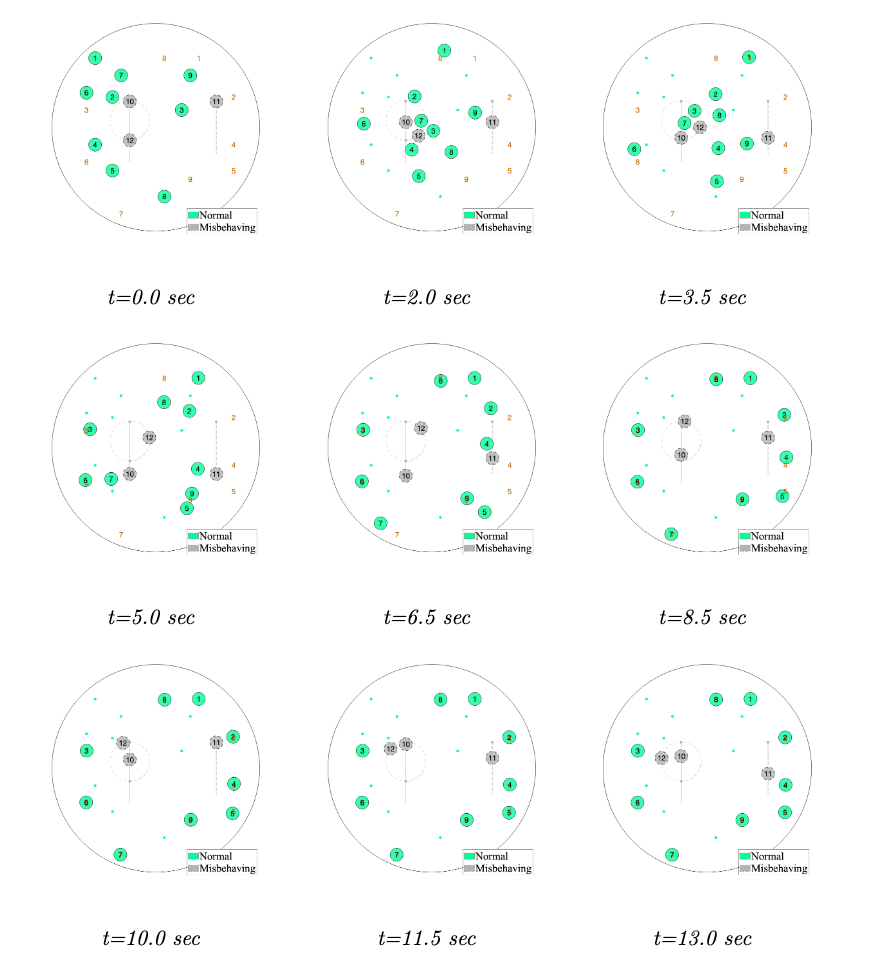
Distributed Coordination for Multi-Vehicle Systems in the Presence of Misbehaving Vehicles
Multi-task coordination of vehicles with bicycle models, developing Lyapunov-like barrier functions for collision avoidance, connectivity maintenance, and convergence under misbehaving agents.

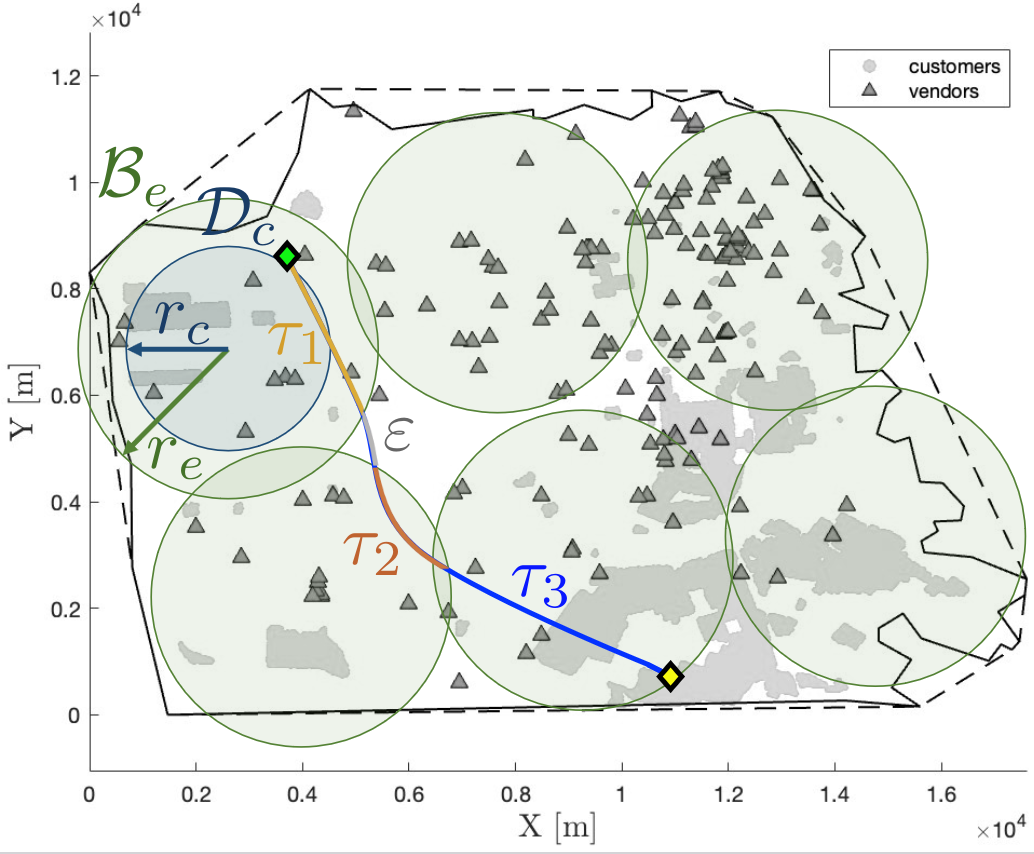
Privacy-Aware Design and Analysis of Drone Remote Identification Systems
A comprehensive framework characterizing surveillance coverage and trajectory privacy using Plausibly Reachable Zone (PRZ) and Envelope (PRE) metrics, applied to urban geographies of San Francisco, NYC, and Los Angeles.

Combining Reinforcement Learning and Barrier Functions for Adaptive Risk Management in Portfolio Optimization
RIPO framework integrating RL-based trading agents and barrier function-based risk controllers to balance long-term profits with acceptable short-term risk exposure.
Remote Identification Trajectory Coverage in Urban Air Mobility Applications
Idealized analysis of Remote Identification coverage proportions for uncrewed aircraft systems, verified with San Diego urban dataset simulations.
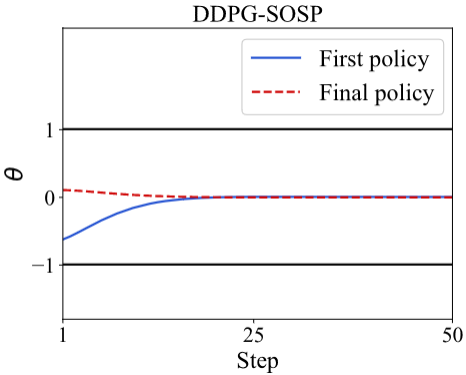
Barrier Certified Safety Learning Control: When Sum-of-Square Programming Meets Reinforcement Learning
Combining Sum-of-Squares programming with Reinforcement Learning to generate real-time controllers for diverse robotic applications.

On Estimating the Probabilistic Region of Attraction for Partially Unknown Nonlinear Systems: An Sum-of-Squares Approach
Lyapunov-Barrier function approach for estimating certified Region-of-Attraction under noise, assessing stability of partially unknown systems.

Sum-of-Squares Program and Safe Learning on Maximizing the Region of Attraction of Partially Unknown Systems
Region-of-Attraction guided controller for stabilizing partially unknown dynamical systems approximated by Gaussian Processes, with strict probability guarantees.